We use cookies to provide you with a better experience. By continuing to browse the site you are agreeing to our use of cookies in accordance with our Privacy Policy.
Home » Parker Launches Parker Automation Manager 1.3
Parker Launches Parker Automation Manager 1.3
May 11, 2017
Parker’s Electromechanical and Drives Division – North America is pleased to announce the release of Parker Automation Manager (PAM) 1.3. This update significantly expands the Parker Automation Controller (PAC) features and functionality, allowing users to integrate complex robotics into their machine controller in an easy-to-use, graphical environment.
While the PAC is Parker’s all-in-one machine controls solution that combines PLC, HMI, and motion control functionality into a single device, PAM is the single integrated development environment (IDE) used to program it. PAM is standardized on the IEC 61131-3 programming language and PLCOpen motion control function blocks. This choice provides machine builders the ability to use traditional ladder diagram (LD) but also to take advantage of the latest control languages available, such as Structured Text (ST), Continuous Function Chart (CFC), and Sequential Function Chart (SFC). IEC 61131-3 brings object oriented-like programming capabilities to the automation industry with the ability to create custom function blocks, libraries, and various data types. This allows OEMs to create modular code that can be re-used, which significantly reduces the overall time to develop machines.
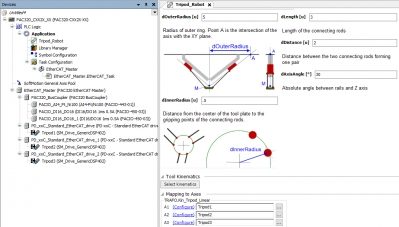
Not only does it support the PLCOpen environment, but PAM comes packed with tools such as the CAM table editor, CNC capabilities using .dxf to G-code converters, graphical motion path editing, and pre-made inverse kinematic function blocks for robotics such as delta and H-bots, SCARA, and gantry systems. With the latest update of PAM 1.3, users can now utilize the Kinematics Helper, a visual wizard that helps users walk through configuring complex robotics in a visual, point-and-click environment that takes the complexity out of robotics control. With the addition of PLCOpen4 support, programmers can now take advantage of Machine (or Robot), Part, and World coordinate systems. This means the developer creates an entire factory line, complete with multiple robotics, and track the orientation of a part—all in a single control system and programming environment. This significantly reduces project complexity, eliminating the need to have multiple sub-systems communicate, as control is completely centralized in the PAC.
The same IEC 61131-3 programmed to control the PAC PLC logic is also used to control the logic of the embedded HMI, WebVisu. There is no tag sharing or additional layers of logic required to get the PLC to communicate to the HMI—they’re completely and seamlessly integrated. Like traditional HMIs, WebVisu allows programmers to develop their HMI using easy drag-and-drop tools such as buttons, sliders, and pre-made alarm and recipe objects. WebVisu also takes advantage of web-publishing technology so that any remote client, such as a browser or mobile device using Parker’s Remote Manager (RemoteMgr) App, can connect to the embedded HMI simply by entering in the PAC’s IP address and target application. User management tools inside PAM allow developers to control how much access each user has.