

Bibby Offers Torque Limiters for Plant Protection
Large machinery and rotating systems can generate enough rotating energy (inertia) to cause significant machine damage during a jam, crash stop, or during uncontrolled braking due to, for example, a power failure. The inertia generated within such machinery is dependent upon the speed and the mass of the rotating system. A large mass at slow speed could do more damage than a smaller mass at high speed during a jam or crash stop for example.
At very low speeds systems can develop a huge amount of unnecessary torque, which can seriously damage drive system components such as shafts, gearboxes, chain and couplings.
So what alternatives might we use to protect machinery from the mechanical overload generated by a jam or a crash?
Shear pins have protected rotating equipment for centuries, but they lack accuracy and can require much time to repair after overload. Shearpin drives are frequently abused by equipment operators who, by fitting the wrong shearpin, can defeat the designed release torque. To maximize plant uptime and improve the accuracy of release torque, vendors have developed a variety of torque overload release devices with integral bearings and simple mechanical reset features.
Friction clutches are one of the most common types of clutch, however, as a safety device in a higher load application, they can slip and wear, producing inaccurate and changeable torque settings.
Sensing devices, such as current sensors, monitor one particular aspect of the drive and provide an output or alarm when that function deviates from preset norms for a preset time period.
Electronic control devices continuously monitor the machine, comparing, for example, the difference between actual and theoretical positions of various components.
Electrical torque limiting solutions, such as the final two examples above, are becoming increasingly popular in many industries as they are seen to provide higher degrees of accuracy and offer reduced downtimes in the event of overload. When a sensor or control detects a problem, corrective action can include stopping and reversing the drive, engaging a brake, or simply shutting down the machine
The protective functions integrated into today's sensing and control units are an expedient supplement to the mechanical torque limiting clutch, but not a replacement. Thus, mechanical torque limiters still make sense, but not necessarily for every application. As with the design of the drive itself, engineers should consider numerous factors before determining the best means of protection. However, relying only on electrical/electronic devices will most certainly result in equipment and machinery that is inadequately protected and prone to overload-induced damage and downtime.
When torque increases relatively slowly, there is enough time for electrical/electronic devices to detect problems and initiate corrective actions prior to reaching the clutch's set torque. In these instances the solution is ideal as it prevents damage to the drive system and requires little, or no, downtime to reset the equipment. However, if the collision torque rises quickly (a "hard" collision), due to the speed or mass of the rotating components, the electronic control may not be able to react before significant damage occurs.
At these higher rates of increase there is virtually no time for an electrical/electronic device to recognize the problem and begin corrective action before the torque reaches the set-point of the clutch. In this situation, only a mechanical overload device can react quickly enough to prevent damage. A mechanical safety coupling, for example, completely disconnects the drive from the load within 3 to 5 ms; 1/3 of the time needed by an electronic cut-off.
The complexity of each system should also be considered, especially in applications which are remote or have limited access. Electronic monitoring systems need multiple sensors for data; between the monitoring system and all of its sensors and other components, you have a system with multiple possible points of failure. Once installed a mechanical limiter can be left in situ with minimal maintenance, and yet offer complete reliability in the case of overload.
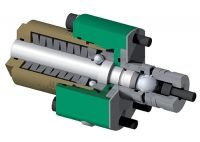
The UEP range of modular torque limiters from Bibby Turboflex, part of Altra Industrial Motion, has been developed to provide optimum protection against overloads and deliver maximum safeguarding against expensive failures and prolonged downtime on machinery. It offers users the key benefits of simplified installation; very accurate release torque repeatability, achieved with minimal variation between static and dynamic release; simple fast manual re-engagement; and low cost maintenance.
The UEP range of modular torque limiters was designed specifically to offer an alternative to shearpin protection for high torque drives where it’s accurate release torque repeatability coupled with fast reset feature offers a significant reduction in downtime. Also, being relatively tamper-proof, they prevent unauthorised personnel from changing the release torque setting.
The optimised design of the UEP torque limiters also means that installation is highly flexible, enabling the centre section of the torque limiter to be removed without the need to move the motor or gearbox. Similar design versatility ensures that any maintenance of the modules is a straightforward operation, and that recalibration is a simple removal operation achieved without having to replace the complete torque limiter unit.
When considering how best to protect machinery from overload it is important to consider the different scenarios where this might occur. Electrical monitoring or sensing equipment can initiate corrective actions prior to overload during a slow torque increase; however there are times when the increase is too fast and the electrical system may be too slow to prevent damage to other components.
Free Power Transmission Engineering Subscriptions
Free Power Transmission Engineering Subscriptions
FEATURED VIDEO
August 9, 2024
RECOMMENDED
-
-
Lubrication Excellence
October 2, 2024
-
A Backward Glance at TPS 2024
October 2, 2024
-
CCTY Tackles Humanoid and Industrial Robot Development
September 13, 2024
-
Environmental Engineering
October 2, 2024
-
CCTY Tackles Humanoid and Industrial Robot Development
September 13, 2024 -
Environmental Engineering
October 2, 2024 -